Robotic Assisted Surgery
Treatments
What is Robotic Assisted Surgery?
Conventional knee replacement consists of cutting jigs and instruments which are aligned using the surgeons experience and eyeballing. Locating the centre of hip is to an extent guesswork and most surgeons cut femur at a predetermined angle taking into account height , weight and sex of the patient. In addition conventional TKR needs intramedullary rods for placements of femoral jigs. There are a number of papers which site that even the most experienced surgeon will have an alignment miss by >3degrees in 15 to 20 percent of the cases that is to say he will be right about 80 – 85% of the time only.
More recently, computer-assisted systems have been developed to improve the positioning of the prosthesis components with the goal of improving the postoperative prosthesis alignment, which in turn should improve the overall survivorship of the prosthesis. Computer-assisted surgery (CAS) has shown to improve the positioning of implant placement and more properly align the lower limb mechanical axis according to the desired plan. CAS has shown to reduce outliners of mechanical leg axis >3° valgus/varus deviation compared to the conventional technique.
History of Robotic Assisted Surgery
Navigation was first tried experimentally in the 1980s but has revolutionized joint replacement in the last decade. Frederich Picard performed the first intraoperative computer-navigated knee replacement surgery in 1997.
How it Works?
Image Free Technique
This is the most commonly used technique for navigated TKR. It utilizes the technique of bone morphing or surface registration. In a predetermined sequence the surgeon here identifies the key anatomical landmark for the computer. Registration will than tell the computer where the bone is in three dimensions. The most fundamental aspect of registration is accuracy in doing this. Once registration is completed, it is possible to proceed with the surgery.
Registration & Planning
After the initial process of registration, the computer gathers the information regarding joint anatomy and size and limb alignment and matches the anatomy with the size and type of implant. The computer then gives the information regarding the orientation of bony cuts, implant sizing and soft tissue tension.
Cutting, Sizing, Component Position & Verification
After registration the surgeon sets the cutting blocks in his preferred alignment and slope. The alignment is confirmed on the computer screen within a degree and millimeter. The computer receives the information in real time via beacons fixed to the patient’s bones using infrared sensors of an infrared camera. The computer screen provides the visual images required for the surgery in real time allowing surgeon to correctly place the jigs. The decision is taken by the surgeon.

Advantages & Disadvantages
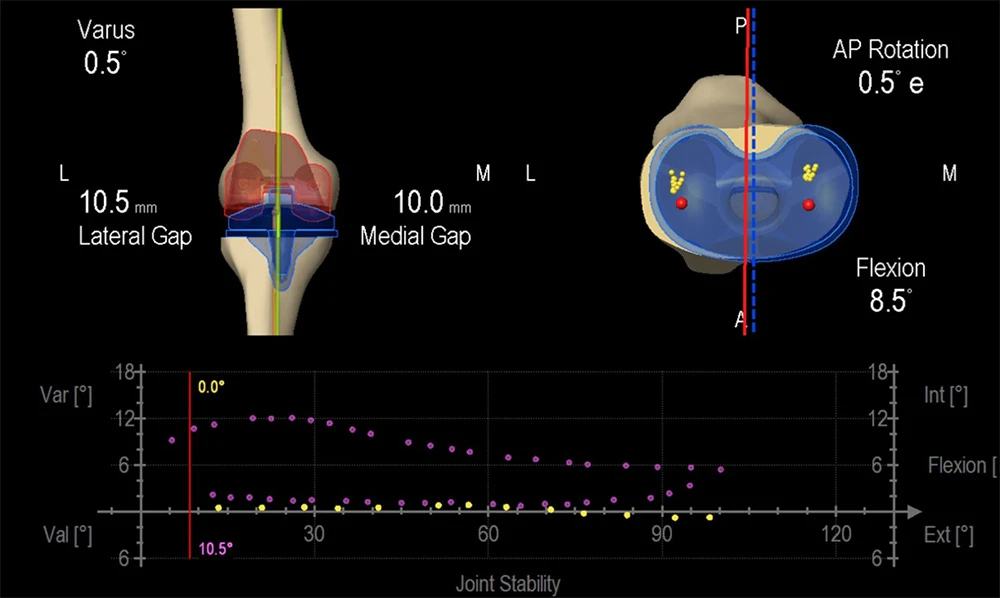
- Real time assessment of tissue balancing at any angle of flexion with patella in place as compared to conventional TKR where tensioning devices can be used in zero and 90° only. This calculation of soft tissue tension aids a surgeon in giving a perfectly balanced knee .
- Accurate restoration of mechanical limb axis.
- Reduced blood loss.
- Decrease in incidence of fat embolism due to extramedullary instrumentation.
- Surgeon is more in control and has power to correct any errors before attempting any cuts.
- Prolonged operative time which comes down as the surgeons gets the hang of it.
- Significant cost for purchase and maintenance of the system which may be neutralized in the long run by improved survivorship and reduced failures and revisions. Although the surgery is performed using a computer system, it does not mean that it can be done by a surgeon with any less knowledge and skill. The procedure combines the surgeon’s skill with computer technology which makes it verifiable intraoperatively.